A Coordinated Electric System Interconnection Review—the utility’s deep-dive on technical and cost impacts of your project.
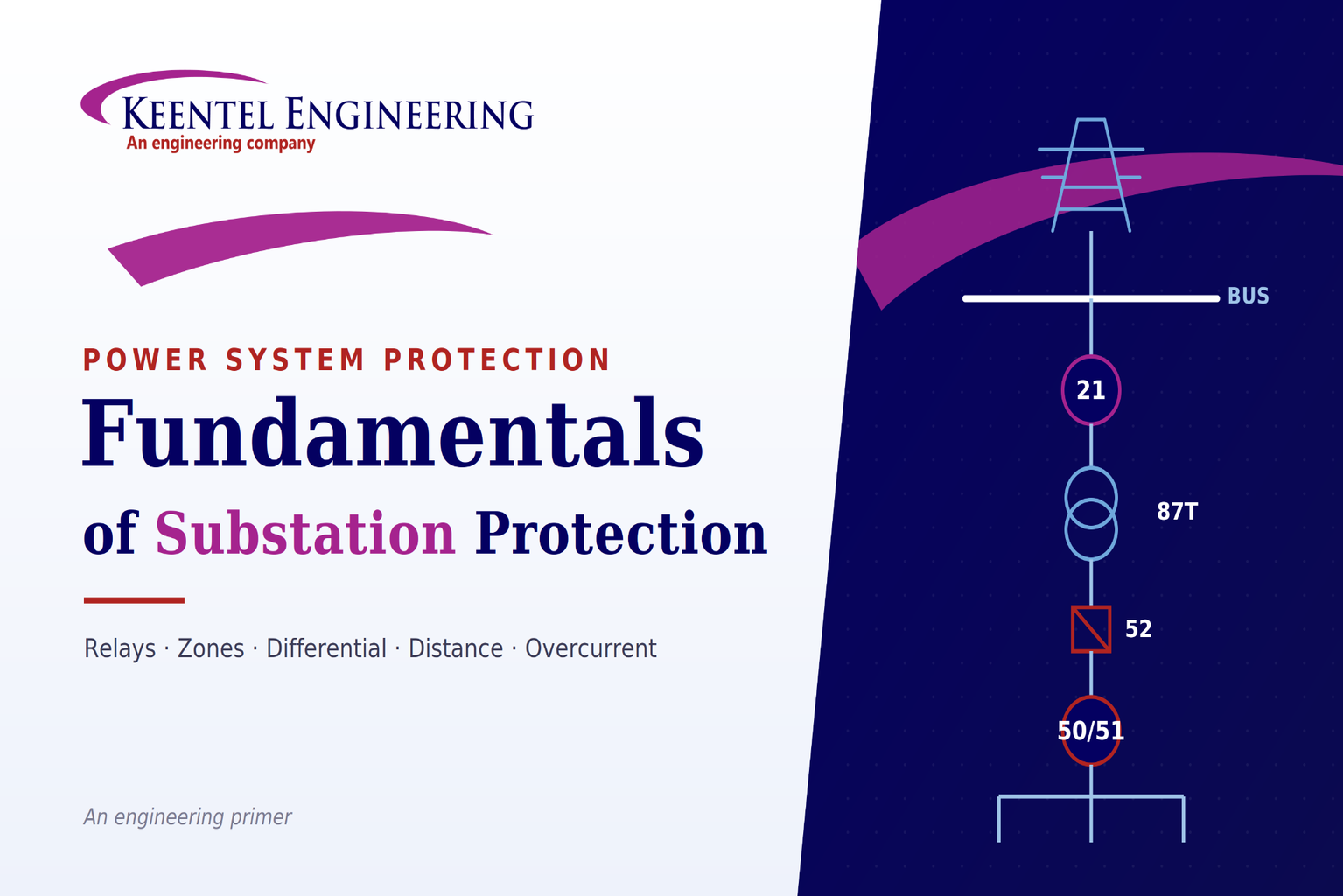
Challenge: Frequent false tripping using conventional electromechanical relays
Solution: SEL-487E integration with multi-terminal differential protection and dynamic inrush restraint
Result: 90% reduction in false trips, saving over $250,000 in downtime
Fast & Real-Time EMT Simulation for Low-Inertia Power Systems
Jul 02, 2026 | Blog
The modern bulk power system is undergoing the most fundamental change in its dynamic character since interconnection began. Inverter-based resources (IBRs) such as utility-scale wind and solar, flexible AC transmission system (FACTS) devices, and high-voltage direct current (HVDC) links are being added at record pace, while synchronous thermal and nuclear plants retire. The net effect is a steady, structural decline in system inertia. The fast power-electronic controllers that replace synchronous machines are expected to stabilize the grid, but they are also highly sensitive to fast transients, harmonics, and network imbalances phenomena that conventional planning tools were never designed to capture.
In this article, Keentel Engineering examines why detailed electromagnetic transient (EMT) simulation has become indispensable for large-scale, low-inertia grids; why simplified positive-sequence RMS studies fall short; how parallel computing on high-performance clusters and cloud infrastructure now makes real-time and even faster-than-real-time EMT simulation of multi-thousand-bus systems achievable; and how these capabilities enable hardware-in-the-loop (HIL) controller testing, software-in-the-loop (SIL) screening, wide-area control validation, and online transient stability assessment (TSA).
Why RMS Simulation Alone Is No Longer Enough
For decades, transient stability assessment of large interconnections was performed almost exclusively with positive-sequence, phasor-domain (RMS) dynamic simulation. That approach was well matched to a grid dominated by synchronous machines, whose electromechanical dynamics evolve over hundreds of milliseconds to seconds. Power-electronic converters changed the equation. Many converter control and protection functions have time constants and reaction times far faster than a few milliseconds — entirely outside the bandwidth that positive-sequence RMS models can represent.
Three-phase RMS dynamic simulation overcomes some limitations of positive-sequence tools by capturing unbalanced conditions, but it still cannot represent the harmonic content and fast transients to which converter controls and protections actually respond. Industry experience has demonstrated cases in which an RMS model predicted successful ride-through of an HVDC link, while the corresponding EMT model correctly predicted sustained commutation failure and subsequent disconnection of the link. The two tools gave opposite answers to a question with major reliability consequences — and only the EMT result reflected reality.
The direction of the industry is unambiguous. Reliability organizations now recommend that EMT models be required for all newly connecting inverter-based resources, and a growing number of utilities have adopted EMT simulation for wide-area stability analysis, control design, and testing. Interconnection and interoperability standards for transmission-connected IBRs reinforce the same expectation: dynamic performance must be demonstrated with modeling detail that matches the physics of power-electronic equipment.
Keentel Engineering Insight
If your interconnection portfolio includes IBRs, HVDC, or FACTS, plan for EMT studies early. Retrofitting EMT analysis after an RMS-only study campaign frequently uncovers control interactions, ride-through failures, and protection misoperations that force late-stage redesign — the most expensive point in a project to discover them.
The Computational Wall: Why Large-Scale EMT Is Hard
If EMT is clearly the right tool, why has it not simply replaced RMS for wide-area studies? The answer is computation. Detailed EMT simulation of a large grid that integrates many HVDC systems and IBR plants is extremely intensive. A meaningful stability campaign typically requires simulating large-disturbance scenarios of 20 to 30 seconds each, across hundreds of contingencies, to properly assess grid stability, optimize controller settings, and identify worst-case conditions. Executed serially with conventional offline tools, such a campaign can take hours or days, depending on system size, contingency count, and solver efficiency.
The second obstacle is the models themselves. Plant controllers supplied by original equipment manufacturers (OEMs) are usually delivered as pre-compiled black-box binaries — dynamic-link libraries (DLLs) for Windows or shared objects for Linux built for specific simulation tools, with no universal interoperability standard or unified interface. Interfacing these black-box models with real-time simulators or with other simulation environments is complex and time consuming: absent a standard interface, adapting a single controller code with semi-automatic translation tooling can consume on the order of ten engineer-days. Some black-box implementations are also poorly optimized or embed unnecessarily detailed converter representations that demand very small time steps, dragging the entire simulation below real-time speed. In those cases, collaboration with the OEM to optimize the code is often the only path to real-time execution.
Finally, there is the economics of hardware testing. In real-time HIL testing with physical controller replicas, laboratory time is scarce and expensive. It is therefore essential to identify worst-case scenarios and optimized controller settings before committing them to the HIL bench which is exactly what fast, fully numerical SIL simulation provides.
The Study-Simulation Spectrum: From Offline EMT to Digital Twins
A useful way to organize the modern EMT toolchain is as a spectrum of study modes, all built on the same parallel real-time simulator technology:
- Offline EMT simulation with generic control models the classical mode, appropriate for typical EMT studies and plant-level equipment stress evaluation.
- Accelerated / parallel EMT simulation (SIL) with real-code controller emulation used for DER integration studies, interaction studies, and OEM controller model validation. Hundreds of contingencies can be screened in batch on in-house servers or the cloud.
- Real-time simulation (controller HIL) with physical control system replicas used for protection and control design and testing and pre-commissioning tests, where the actual hardware must close the loop against the simulated grid.
- Quasi-real-time or faster-than-real-time simulation the digital-twin mode for operations: transient security assessment and contingency analysis connected to the system state estimator, re-initialized from a fresh operating state every 5 to 10 minutes.
When the number of IBRs in a study footprint becomes very large, deploying physical control replicas for every power-electronic system becomes impractical or prohibitively expensive. The practical compromise is hybrid: the critical systems — for example, the new HVDC link or IBR plant being interconnected — run in HIL mode with physical replicas, while the remainder of the system is represented with previously validated generic controller models or black-box controller emulators. In other campaigns, parameter optimization and performance testing are executed entirely in SIL with black-box emulators, validated generic models, or a mix of both. In every mode, one operational requirement holds: simulation turnaround must remain fast enough for effective interaction with simulation specialists, who may need to modify test sequences, validate results, or investigate abnormal phenomena while a campaign is running.
How Real-Time EMT Speed Is Achieved
Real-time simulation imposes a hard constraint: every simulation time step must be computed within the corresponding wall-clock interval. That constraint has driven the development of advanced fixed time-step solvers and computational techniques that maintain numerical stability and accuracy under strict timing budgets. Three techniques do most of the heavy lifting:
1. System decoupling and parallelization
Large networks are decoupled into smaller subsystems for parallel computation, exploiting the natural wave propagation delay of long transmission lines as a physically exact decoupling boundary. Decoupling shrinks the individual subsystem admittance matrices, which accelerates the solution dramatically compared to factorizing a single large matrix for the complete system. Mature real-time platforms automatically distribute the model across processors and manage inter-processor communication, so the engineering team is not hand-partitioning the network.
2. Compensation and interpolation for switching events
Power-electronic switching events rarely align with fixed time-step boundaries. Compensation and interpolation methods represent fast switching accurately within a fixed step, preserving accuracy at a relatively larger time step than an uncompensated detailed-switch model would require. For IBR converter representation, a switching-function converter model is the recommended compromise: it delivers close to the fidelity of detailed switch models at close to the real-time performance of average models.
3. Efficient parallel scaling on high-performance hardware
Combined with modern multi-core servers, these techniques scale remarkably well. A benchmark of a real utility interconnection of roughly 1,666 three-phase buses — including 111 electrical machines, 432 lines and cables, 338 three-phase transformers, multiple HVDC converters, static compensators, and wind plants — achieved hard real-time at a 40-microsecond time step on fewer than 60 processor cores. The parallel-scaling numbers are striking: a 15-second event that required 2,565 seconds on one CPU completed in 15 seconds on 56 CPUs, versus a theoretical linear-scaling expectation of 46 seconds. Actual efficiency exceeded 300%, a result of effective processor cache management and the move to more powerful CPUs on a Linux real-time environment.
Just as important for the broader industry: these EMT acceleration techniques, matured over decades in real-time simulators, are now being adopted by mainstream offline EMT tools as well — a rising tide that benefits every stakeholder performing power system analysis.
Interfacing OEM Black-Box Controllers at Scale
A typical utility-scale IBR plant model consists of the electrical circuit plus a hierarchy of controllers. Local and point-of-common-coupling measurements are sampled and fed to the controls; a plant-level controller determines power setpoints and provides protection and secondary control; a converter controller implements the primary control functions and DC-circuit protection; and duty cycles or gating pulses are fed back to the electrical circuit, depending on whether an average or detailed converter representation is selected. In practice, the plant and converter controllers arrive from the OEM as pre-compiled black-box code that must communicate with the grid solver at its own native time step, orchestrated by a co-simulation scheme.
Two automated import pathways now remove most of the historical integration pain:
- Automatic import of tool-specific DLLs. Where the OEM controller is pre-compiled for a popular offline EMT tool, an automatic import function wraps the DLL in an interface layer so the resulting real-time controller block exposes exactly the same I/O and parameters as the original. An automatic open-loop validation against recorded signals is executed during import, confirming fidelity before the controller ever runs in closed loop.
- Standards-based import. Where the OEM code follows emerging industry guidelines for real-code controller interchange, a dedicated interface integrates it directly. Controllers imported this way can execute in near-real-time on Windows and be distributed across parallel processors on the same simulator or a separate one.
Both pathways scale to hundreds of controller instances on a single standard simulator. For real-time HIL campaigns that mix black-box code with physical replicas, tooling is also emerging to execute Windows-compiled DLLs on top of a hard-real-time Linux environment — closing the last gap between OEM deliverables and the HIL bench.
Proof at Scale: A 4,000-Bus, 150-Plant IBR Benchmark
How far do these techniques take you today? A synthetic continental-scale benchmark provides a concrete answer. The network comprises approximately 4,000 three-phase buses; 6,700 lines, loads, and switched shunt reactors; 2,000 transformers and synchronous machines; 150 IBR plants (solar and wind); 300 OEM pre-compiled controller DLLs; 70 FACTS and HVDC converters; and 100 protection relay models.
| Benchmark Element | Approximate Count |
|---|---|
| Three-phase buses | 4,000 |
| Lines, loads, switched shunt reactors | 6,700 |
| Transformers and synchronous machines | 2,000 |
| IBR plants (solar, wind) | 150 |
| OEM controllers (pre-compiled DLLs) | 300 |
| FACTS and HVDC converters | 70 |
| Protection relay models | 100 |
Running on a 500-core Windows server cluster one high-performance 128-core machine plus 22 high-performance 4-GHz 18-core machines a 30-second EMT event completes in 90 seconds of wall-clock time. Roughly 100 cores carry the 4,000-bus electrical network at a 50-microsecond time step, while about 300 cores execute the manufacturer controller codes at their native 10-microsecond or 16.67-microsecond steps. Three-times-slower-than-real-time may sound modest, but its practical impact is enormous: a large contingency campaign that formerly consumed days can now be completed in about an hour, and a 90-second turnaround on a 30-second phenomenon is fast enough to support online EMT TSA delivering results on a 15-minute operational cadence.
Notably, real-time speed was within reach for the network solution itself; the limiting factor was a handful of black-box controllers whose implementations consume disproportionate compute. That finding carries a procurement lesson: OEM cooperation on controller code optimization should be negotiated up front, because it is frequently the binding constraint on real-time execution. Near-real-time results also accelerate a complementary workflow developing and validating reduced-order equivalents so that critical cases can be re-run in hard real-time with replicas and DLLs on smaller simulator facilities.
Cloud-Based EMT and Wide-Area Control HIL
The same parallel EMT technology is moving to commercial cloud infrastructure, eliminating the need to purchase and maintain in-house server clusters and letting computation scale elastically with study demand across many users and departments. Cloud deployment raises an obvious question: can a grid simulated in a remote data center close the loop with physical control hardware in a local laboratory? For wide-area applications, the answer demonstrated to date is yes.
In a proof-of-concept configuration, a modified 118-bus transmission benchmark augmented with IBR generation is simulated on a cloud server. Four IBR plants are added two Type-3 wind turbine generation systems and two photovoltaic generation systems along with two switched capacitor banks located at buses electrically close to the IBRs to support voltage regulation at each plant's point of connection. Virtual phasor measurement units (PMUs) placed throughout the network stream time-stamped synchrophasor data over the standard synchrophasor communication protocol to a wide-area control (WAC) algorithm executing in real time on a local industrial controller — the same class of computer hardware used in actual control rooms. When the WAC detects an undervoltage event, it sends a command back to the cloud-hosted grid model to switch the appropriate capacitor bank via industrial TCP signaling.
Two disturbance scenarios illustrate closed-loop behavior. In the first, a three-phase-to-ground fault occurs with protection failing to pick up: voltage at a wind plant's point of connection collapses to roughly 0.62 per unit, the WAC issues its switch-on command 0.583 seconds after fault inception, the capacitor bank compensates the voltage to about 0.75 per unit, and after fault removal the voltage recovers to nominal and the bank is disconnected. In the second, an identical fault is cleared within 0.3 seconds by line disconnection; voltage never sags significantly, and the WAC correctly refrains from switching. Discrimination between the two cases acting decisively when needed, staying quiet when not is precisely what wide-area special protection scheme validation must demonstrate.
Computational performance on the cloud held comfortably within the real-time budget: across the seven cores used, average per-step execution times ranged from 14.7 to 39.2 microseconds against a 50-microsecond time step. Because the synchrophasor protocol carries time-stamped data referenced to the simulator clock, results remain valid for controller HIL even though generic Ethernet between cloud and laboratory is slower than the dedicated channels of production wide-area networks. The same architecture extends naturally to very large grids with hundreds of IBRs and distributed wide-area control and the WAC software itself can be hosted in the cloud for a fully digital SIL campaign before any hardware enters the loop.
What This Means for Asset Owners and Operators
Contingency screening that took days now fits in an hour worst cases are identified before expensive HIL bench time is committed.
Online EMT transient stability assessment on a 15-minute cadence is now technically feasible, opening the door to true operational digital twins initialized from the state estimator.
Wide-area monitoring, protection, and control schemes can be validated end-to-end first in fully digital SIL, then in HIL against control-room-grade hardware without owning a supercomputer.
Case Studies
Case Study 1: Hard Real-Time EMT Simulation of a Complete Utility Transmission System with Embedded HVDC
Background
A large utility operates a transmission system of approximately 1,666 three-phase buses whose dynamic behavior is shaped by a demanding mix of conventional and power-electronic assets: 111 electrical machines with 86 governors, 81 excitation systems, and 54 stabilizers; 432 lines and cables; 338 three-phase transformers; 165 dynamic loads; six HVDC converters; ten static compensators; and six wind power plants. For a system of this composition, controller and protection interactions between HVDC links, static compensation, and wind generation cannot be adequately evaluated with phasor-domain tools the utility required a full EMT representation of the entire interconnected system, executable in hard real-time so that physical control and protection equipment could be tested in closed loop.
Challenge
EMT simulation of a complete utility grid not a reduced equivalent at a time step small enough to represent HVDC and FACTS control dynamics is a formidable computational problem. Executed on a single processor, a 15-second disturbance event required 2,565 seconds of computation: 171 times slower than real time, and far too slow for interactive study work, let alone hardware-in-the-loop (HIL) testing, which demands that every simulation time step complete within its wall-clock interval without exception. The engineering question was whether parallel decomposition could close a two-orders-of-magnitude speed gap while preserving numerical stability and waveform-level accuracy.
Approach
- Physics-based network decoupling. The system was partitioned into subsystems along long transmission lines, whose natural wave propagation delay provides an exact decoupling boundary at the EMT time step. Decoupling shrinks each subsystem's admittance matrix, so many small matrices are solved in parallel instead of one very large matrix serially.
- Automatic parallel task mapping. The simulation platform automatically distributed the model across processor cores and managed all inter-processor communication, eliminating manual partitioning and ensuring balanced core utilization.
- Fixed-step solvers with switching compensation. Advanced fixed time-step solvers with compensation and interpolation techniques represented fast power-electronic switching accurately within the fixed step, allowing a practical time step without sacrificing converter fidelity.
- Cache-efficient execution on modern hardware. The production benchmark ran on eight 8-core high-frequency server-class processor modules (3.5 GHz, large L3 cache) within a single high-performance shared-memory server, on a Linux real-time operating environment.
Results
| Metric | Single CPU | 4 CPUs | 56 CPUs |
|---|---|---|---|
| Wall-clock time, 15-second event | 2,565 s | 2,565 s | 15 s |
| Theoretical time at 100% linear efficiency | _ | 641 s | 46 s |
| Achieved parallel efficiency | baseline | 82% | 305% |
Case Study 3: Cloud-Hosted EMT Simulation with Hardware-in-the-Loop Wide-Area Control Validation
Background
A proof-of-concept program set out to answer a question with major cost implications for utilities and study consultants alike: can large-scale EMT simulation move to commercial cloud infrastructure — eliminating in-house simulator server ownership and scaling elastically across users and departments — while still supporting hardware-in-the-loop testing of wide-area monitoring, protection, and control (WAMPAC) equipment located in a physical laboratory? The test article was a modified 118-bus transmission benchmark (186 branches, 99 loads, 18 synchronous machines) augmented with four IBR plants: two Type-3 wind turbine generation systems and two photovoltaic generation systems. Two switched capacitor banks were added at buses electrically close to the IBR plants to support voltage regulation at each plant's point of connection.
Challenge
Cloud servers are not hard-real-time machines: the environment used was Windows-based and not optimized for deterministic microsecond scheduling, and the Ethernet path between a commercial cloud data center and a laboratory is slower and less deterministic than the dedicated communication channels of production wide-area networks. The scheme under test — a wide-area control (WAC) algorithm performing special-protection-scheme-class capacitor switching — had to demonstrate both dependability (acting correctly on genuine undervoltage events) and security (refraining from action on self-clearing disturbances) across that non-ideal communication fabric, with the physical controller executing on the same class of industrial computer hardware used in actual control rooms.
Approach
- Grid model on the cloud. The complete EMT model, including the four IBR plants and both capacitor banks, was executed on a cloud-hosted parallel simulation service at a 50-microsecond time step across seven processor cores.
- Virtual PMUs with time-stamped synchrophasor streaming. Virtual phasor measurement units placed throughout the network reported synchrophasor data to the laboratory over the standard synchrophasor protocol. Because the protocol carries data time-stamped against the simulator's 50-µs clock, measurement validity is preserved despite variable network latency the architectural insight that makes cloud HIL viable for wide-area applications.
- Physical WAC controller in the loop. The wide-area control algorithm executed in real time on a local industrial controller computer. Upon detecting an undervoltage condition, it issued switching commands back to the cloud-hosted grid model via an industrial TCP protocol to energize the appropriate capacitor bank.
- Dependability/security scenario pair. Scenario 1: a three-phase-to-ground fault with primary protection failing to pick up a sustained depressed-voltage condition requiring WAC action. Scenario 2: an identical fault at the end of a transmission line, cleared in 0.3 seconds by line disconnection a self-clearing event requiring no action.
Results
| Test Element | Scenario 1 (Protection Fails) | Scenario 2 (Fault Cleared 0.3 s) |
|---|---|---|
| Voltage at wind plant point of connection | Depressed to ≈0.62 pu | No significant sag |
| WAC response time after fault inception | 0.583 s to switch-on command | No command issued (correct restraint) |
| Post-switching voltage support | Compensated to ≈0.75 pu | _ |
| Post-event behavior | Nominal voltage recovered; bank released | System returned to normal |
| Cloud Core ID | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| 1Average execution time (µs) | 15.8 | 37.1 | 39.2 | 14.7 | 18.0 | 25.0 | 18.9 |
Average per-step execution time on every cloud core remained below the 50-microsecond simulation time step, confirming comfortable computational margin. The closed-loop scenario pair demonstrated both required properties of a special protection scheme: decisive, correctly targeted action on the sustained undervoltage event, and correct restraint on the self-clearing fault. The results validate cloud-hosted EMT HIL for wide-area schemes communicating over TCP/IP-based protocols synchrophasor, Modbus, DNP3 and similar provided communication latency remains within pre-defined boundaries. The same architecture extends to very large grids with hundreds of IBRs and distributed wide-area control, and the WAC software itself can be cloud-hosted for a fully digital SIL campaign before hardware enters the loop. A Linux-based cloud environment is under implementation to further raise computational performance beyond the Windows-based proof of concept.
Key Takeaways
Time-stamped synchrophasor data is the enabling insight: simulator-clock time-stamping preserves measurement validity across non-deterministic cloud-to-lab Ethernet.
Cloud HIL is production-relevant today for WAMPAC-class schemes on TCP/IP protocols; microsecond-loop local controllers still require on-premises real-time simulators.
Both dependability and security of a wide-area special protection scheme were demonstrated in closed loop against control-room-grade hardware.
Elastic cloud scaling lets multiple specialists and departments run simultaneous studies without capital investment in simulator clusters.
Conclusions
Two complementary acceleration paths have now been demonstrated at convincing scale. Proprietary clusters of high-performance standard computers can simulate a 4,000-bus continental-scale system with 150 IBR plants and 300 OEM controller binaries at one-third of real-time speed on 500 processors, and can run a real 1,666-bus utility grid HVDC and static compensation included in hard real-time on fewer than 60 processors. Commercial cloud servers, meanwhile, have proven capable of hosting wide-area control HIL tests against actual controller hardware, with elastic scaling for many simultaneous users and studies.
The benefits compound across the project lifecycle: rapid identification of critical scenarios for focused HIL analysis; faster EMT planning and IBR connection studies with more contingencies assessed in less time; operator-facing real-time EMT TSA tools and digital twins refreshed on operational timescales; and shorter turnaround when specialists must chase root causes of instability observed in the field or in simulation. As these acceleration techniques migrate into mainstream offline tools as well, the entire industry's analytical ceiling rises. For grids shedding inertia as quickly as they are adding inverters, fast and real-time EMT simulation is no longer a research luxury it is the foundation of reliable integration.
Frequently Asked Questions: Fast and Real-Time EMT Simulation
Q: What is EMT simulation, and how is it different from RMS (phasor-domain) simulation?
Electromagnetic transient (EMT) simulation solves the full differential equations of the network at the waveform level, typically with fixed time steps in the tens of microseconds, capturing point-on-wave behavior, harmonics, unbalance, and fast switching dynamics. RMS (phasor-domain) simulation represents the network with fundamental-frequency phasors and captures electromechanical dynamics on the hundreds-of-milliseconds-and-slower timescale. RMS is computationally cheap and was well suited to synchronous-machine-dominated grids; EMT is required when the equipment under study — converter controls and protections in particular — responds to phenomena faster than a few milliseconds that phasor models simply cannot see.
Q: Why can't positive-sequence RMS studies be trusted for grids with high IBR penetration?
Converter control and protection functions react to harmonics and fast transients that are invisible to positive-sequence phasor models. Industry experience includes a documented case in which the RMS model of an HVDC link predicted normal operation while the EMT model of the same event correctly predicted sustained commutation failure and disconnection of the link. Three-phase RMS simulation improves on positive-sequence by capturing unbalance, but it still cannot represent harmonic and fast-transient interactions. That is why reliability organizations now recommend EMT models for all newly connecting IBRs, and why utilities increasingly adopt EMT for wide-area stability analysis, control design, and testing.
Q: What makes large-scale EMT simulation so computationally expensive?
Three factors compound. First, the physics: waveform-level solution of a multi-thousand-bus network at time steps around 50 microseconds is inherently orders of magnitude more work per simulated second than phasor solution. Second, the study scope: assessing stability properly requires simulating large-disturbance scenarios of 20 to 30 seconds across hundreds of contingencies to find worst cases and optimize controller settings — hours or days of serial computation. Third, the models: OEM controllers arrive as pre-compiled black-box binaries, often unoptimized or built with unnecessarily detailed converter representations that force very small time steps and slow the entire simulation.
Q: What are SIL and HIL, and when should each be used?
Software-in-the-loop (SIL) is fully numerical simulation in which controller behavior is represented by real-code emulators (black-box binaries) and/or validated generic models — no physical hardware in the loop. Hardware-in-the-loop (HIL) closes the loop between a real-time grid simulation and physical control system replicas or actual controller hardware. SIL is the screening workhorse: it runs faster than real time, executes in batch on servers or cloud, and is ideal for identifying worst-case contingencies and pre-optimizing controller settings. HIL is the validation stage: because replica bench time is scarce and expensive, it is reserved for the critical cases and final performance verification that SIL has already prioritized. On large IBR-rich systems, hybrid campaigns are common — the newly interconnecting HVDC or IBR system runs in HIL with replicas while the surrounding grid uses validated emulators.
Critical Safety Points
A winding carrying DC generates a large voltage kick when disconnected — always make and break with an insulated hot stick.
Never make or break a connection directly on a lead-acid battery terminal; spark-ignited hydrogen has exploded batteries.
Never put yourself in series with the test circuit.
Q: How is real-time speed physically achieved for systems with thousands of buses?
Three techniques carry most of the load. (1) Decoupling: the network is split into subsystems along long transmission lines, whose wave propagation delay provides a physically exact parallelization boundary; smaller subsystem matrices solve far faster than one giant matrix, and mature platforms distribute subsystems across processors automatically. (2) Compensation and interpolation: switching events falling between fixed time steps are handled numerically so accuracy is preserved at a larger time step than detailed-switch modeling would need. (3) Parallel hardware: clusters of high-performance multi-core computers with fast interconnects and automatic task mapping. A benchmark of a real 1,666-bus utility grid with HVDC and static compensators achieved real-time at a 40-microsecond step on fewer than 60 cores — with measured parallel efficiency above 300% relative to single-CPU execution, thanks to cache-efficient partitioning and modern processors on a Linux real-time environment.
Q: What converter model detail should be used for IBR plants in these studies?
A switching-function converter model is the recommended compromise for most system-level work. It approaches the accuracy of a fully detailed switch-level model while retaining nearly the real-time performance of an average-value model. The choice also determines the feedback path in the plant model: with an average model the controller returns duty cycles to the electrical circuit, whereas a detailed representation consumes gating pulses. Fully detailed switch models remain appropriate for focused equipment-level studies, but at wide-area scale they burn computation without commensurate insight.
Q: What exactly is a 'black-box' OEM controller model, and why is it a problem?
It is the manufacturer's actual control code, pre-compiled into a binary — a Windows DLL or Linux shared object — so that the vendor's intellectual property stays protected. The problem is interoperability: these binaries are typically built for one specific simulation tool, with no unified interface standard. Absent automation, adapting a single controller to run in a different simulation environment takes on the order of ten engineer-days with semi-automatic translation tooling. Multiply that by the hundreds of controllers in a realistic study footprint and the integration effort dwarfs the simulation effort. Black-box opacity also complicates root-cause analysis when control instabilities involve equipment from multiple vendors who cannot share design details with each other.
Q: How are black-box controllers integrated efficiently today?
Two automated import pathways exist. First, where the controller is pre-compiled as a DLL for a popular offline EMT tool, an automatic import function wraps it so the resulting real-time block exposes identical I/O and parameters, with automatic open-loop validation against recorded signals performed during import. Second, where the vendor's code follows emerging industry interchange guidelines for real-code controller models, a dedicated standards-based interface integrates it directly, with execution distributable across parallel processors. Both pathways scale to hundreds of controller instances on a single simulator, and tooling is under development to run Windows-compiled DLLs on hard-real-time Linux environments for mixed replica/DLL HIL campaigns.
Q: What performance is realistic for a continental-scale EMT model today?
A synthetic 4,000-bus benchmark — 150 IBR plants, 300 OEM controller DLLs, 70 FACTS/HVDC converters, 2,000 transformers and machines, 100 protection relays — completes a 30-second event in 90 seconds of wall-clock time on a 500-core cluster, with the grid solved at 50 microseconds on about 100 cores and the controller codes at 10 to 16.67 microseconds on about 300 cores. That is one-third of real-time speed, sufficient to compress a hundreds-of-contingencies campaign into roughly an hour and to support a 15-minute online TSA cadence. Hard real-time was limited not by the network solution but by a few computationally heavy black-box controllers — reinforcing that OEM code optimization is often the binding constraint.
Q: Can EMT simulation really run in the cloud, and can it support HIL testing remotely?
Yes, with the right architecture. Parallel EMT platforms now offer on-demand cloud deployment, scaling computation elastically without in-house server ownership. For HIL, the demonstrated approach targets wide-area applications: the grid runs on the cloud, virtual PMUs stream time-stamped synchrophasor data to a wide-area control algorithm executing on local industrial controller hardware, and control commands return via industrial TCP protocols. Because the synchrophasor protocol time-stamps data against the simulator clock, results remain valid even though generic Ethernet is slower than dedicated production communication channels. Measured per-core execution times of roughly 15 to 39 microseconds against a 50-microsecond step confirmed comfortable real-time margin on cloud hardware. Fast local controllers with microsecond-level loop closure still require on-premises real-time simulators; cloud HIL is currently suited to wide-area monitoring, protection, and control (WAMPAC) applications communicating over TCP/IP-based protocols such as synchrophasor, Modbus, and DNP3.
Q: What did the cloud-based wide-area control demonstration actually show?
A modified 118-bus benchmark with four added IBR plants (two Type-3 wind, two PV) and two switched capacitor banks was simulated on the cloud, with a wide-area control algorithm on a local industrial computer monitoring virtual PMU streams. In a scenario where a three-phase fault occurred and protection failed to pick up, plant point-of-connection voltage fell to about 0.62 per unit; the controller commanded capacitor switching 0.583 seconds after fault inception, raising voltage to about 0.75 per unit until fault removal, after which voltage recovered and the bank was released. In a companion scenario where the fault cleared in 0.3 seconds, voltage barely dipped and the controller correctly took no action. The demonstration validated both sensitivity and security of the wide-area scheme in closed loop against control-room-grade hardware.
Q: What is an EMT digital twin, and how close is it to operational reality?
An operational EMT digital twin is a high-fidelity model of the grid — including OEM control emulators — running quasi-real-time or faster, initialized from the system state estimator every 5 to 10 minutes, and used for transient security assessment and contingency analysis in the control room. The enabling milestone is turnaround speed: a 90-second solution of a 30-second phenomenon already supports delivering EMT-grade TSA results at each 15-minute operating interval. As controller code optimization and hardware advances push large models to and beyond real-time, operators gain a continuously refreshed, waveform-accurate view of stability margins that phasor-based tools cannot provide on low-inertia systems.
Q: How many contingencies and what event durations should an EMT stability campaign plan for?
Typical practice simulates large-disturbance scenarios with timeframes of 20 to 30 seconds and evaluates hundreds of contingencies to properly assess stability, tune controller settings, and isolate worst cases. Campaign design should also preserve human-in-the-loop responsiveness: turnaround must be fast enough for simulation specialists to intervene — modifying test sequences, validating results, or investigating anomalies — while the campaign runs, rather than waiting days for a monolithic batch to finish.
Q: Does faster-than-real-time SIL replace HIL testing with physical replicas?
No — it prioritizes it. Fast SIL identifies the worst-case scenarios and pre-optimizes controller settings so that expensive, time-consuming HIL bench sessions concentrate on the cases that matter. Black-box controllers are normally validated by OEMs against replicas using small grid equivalents during factory acceptance testing; the large-scale system studies that transmission operators must perform then rely on fast SIL for breadth and HIL for depth. Large automated test series can be executed in both modes, but the division of labor — SIL for screening, HIL for validation with physical hardware — remains the efficient structure of a modern campaign.
Q: What should an asset owner specify in procurement to avoid EMT integration pain later?
Four items pay for themselves. (1) Require EMT models for all new IBR, HVDC, and FACTS equipment, consistent with current reliability guidance. (2) Require controller deliverables to follow industry real-code interchange guidelines, or at minimum a documented DLL interface compatible with automated import. (3) Secure OEM commitments to optimize controller code for real-time execution if performance testing requires it — unoptimized black-box code is the most common barrier to real-time speed. (4) Plan the study campaign across the full spectrum — offline EMT, accelerated SIL, real-time HIL, and quasi-real-time operational assessment — so models, tools, and validation artifacts carry forward from planning into operations rather than being rebuilt at each stage.
Case Study 2: Near-Real-Time EMT Screening of a 4,000-Bus Grid with 150 IBR Plants and 300 OEM Black-Box Controllers
Background
A continental-scale synthetic transmission network of approximately 4,000 three-phase buses was adopted as the benchmark for a study campaign representative of a real interconnection with very high inverter-based resource (IBR) penetration. The model comprises roughly 6,700 lines, loads, and switched shunt reactors; 2,000 transformers and synchronous machines; 150 utility-scale IBR plants (solar and wind); 70 FACTS and HVDC converters; 100 protection relay models; and — critically — 300 original equipment manufacturer (OEM) controller models delivered as pre-compiled black-box dynamic-link libraries (DLLs). The objective was transient stability assessment and control performance analysis across large contingency sets, with sufficient speed to support both study-campaign screening and, ultimately, online assessment on operational timescales.
Challenge
Three obstacles compounded. First, raw scale: waveform-level EMT solution of a 4,000-bus network at a 50-microsecond time step, across disturbance events 20 to 30 seconds long and contingency sets numbering in the hundreds. Second, black-box integration: 300 vendor controller binaries, compiled for a specific offline simulation tool, with no unified interoperability standard — historical experience shows roughly ten engineer-days per controller for manual adaptation, an untenable 3,000 engineer-day exposure if attacked by hand. Third, heterogeneous timing: the vendor controller codes execute at native time steps of 10 or 16.67 microseconds, several times faster than the grid solution, requiring a co-simulation scheme to orchestrate data exchange without destabilizing either side.
Approach
- Automated DLL import with open-loop validation. An automatic import function wrapped each vendor DLL in an interface layer exposing identical I/O and parameters to the original tool, and executed an automatic open-loop validation against recorded signals during import — confirming each controller's fidelity before closed-loop use. Controllers following industry real-code interchange guidelines were integrated through a dedicated standards-based interface.
- Co-simulation across a compute cluster. The electrical circuits of the IBR plants and the bulk network ran on dedicated cores of the real-time simulator cluster while the OEM controller codes executed in parallel on companion high-performance machines, linked by fast communication channels. Automatic task mapping assigned processes for maximum throughput.
- Switching-function converter models. IBR converters were represented with switching-function models — the recommended compromise delivering near-detailed-switch accuracy at near-average-model speed — keeping the grid time step at 50 µs.
- Scalable hardware architecture. The campaign ran on a 500-core cluster: one high-performance 128-core server plus 22 high-performance 4-GHz 18-core machines. The architecture scales by simply adding processors as IBR plant count grows.
Results
| Metric | Result |
|---|---|
| Simulated event duration | 30 seconds |
| Wall-clock computation time | 90 seconds (3× slower than real time) |
| Grid solution | ≈50 µs time step on ≈100 cores |
| OEM controller execution | 10 / 16.67 µs native steps on ≈300 cores |
| Total cluster size | 500 cores (1×128-core + 22×18-core servers) |
| Contingency campaign impact | Large multi-hundred-case set completed in ≈1 hour |
| Online TSA feasibility | Supports EMT results at each 15-minute operating interval |
How Keentel Engineering Can Help
Keentel Engineering provides EMT and PSS/E modeling, point-of-interconnection engineering, IBR and BESS integration studies, protection and control design support, and NERC compliance
services for utilities, developers, and large-load customers. If your project requires EMT model development, black-box controller integration, SIL/HIL test planning, or interconnection study support for low-inertia grid conditions, our licensed professional engineers can help you scope the right study campaign the first time.
Contact Keentel Engineering to discuss your project.

About the Author:
Sonny Patel P.E. EC
IEEE Senior Member
In 1995, Sandip (Sonny) R. Patel earned his Electrical Engineering degree from the University of Illinois, specializing in Electrical Engineering . But degrees don’t build legacies—action does. For three decades, he’s been shaping the future of engineering, not just as a licensed Professional Engineer across multiple states (Florida, California, New York, West Virginia, and Minnesota), but as a doer. A builder. A leader. Not just an engineer. A Licensed Electrical Contractor in Florida with an Unlimited EC license. Not just an executive. The founder and CEO of KEENTEL LLC—where expertise meets execution. Three decades. Multiple states. Endless impact.
Services

Let's Discuss Your Project
Let's book a call to discuss your electrical engineering project that we can help you with.
About the Author:
Sonny Patel P.E. EC
IEEE Senior Member
In 1995, Sandip (Sonny) R. Patel earned his Electrical Engineering degree from the University of Illinois, specializing in Electrical Engineering . But degrees don’t build legacies—action does. For three decades, he’s been shaping the future of engineering, not just as a licensed Professional Engineer across multiple states (Florida, California, New York, West Virginia, and Minnesota), but as a doer. A builder. A leader. Not just an engineer. A Licensed Electrical Contractor in Florida with an Unlimited EC license. Not just an executive. The founder and CEO of KEENTEL LLC—where expertise meets execution. Three decades. Multiple states. Endless impact.
Leave a Comment
We will get back to you as soon as possible.
Please try again later.
Related Posts